


UART-Serielle Kommunikationsexperiment basierend auf Raspberry Pi 4B und STM32

Globaler Lieferant elektronischer Komponenten AMPHEO PTY LTD: Umfangreiches Inventar für One-Stop-Shopping. Einfache Anfragen, schnelle, individuelle Lösungen und Angebote.
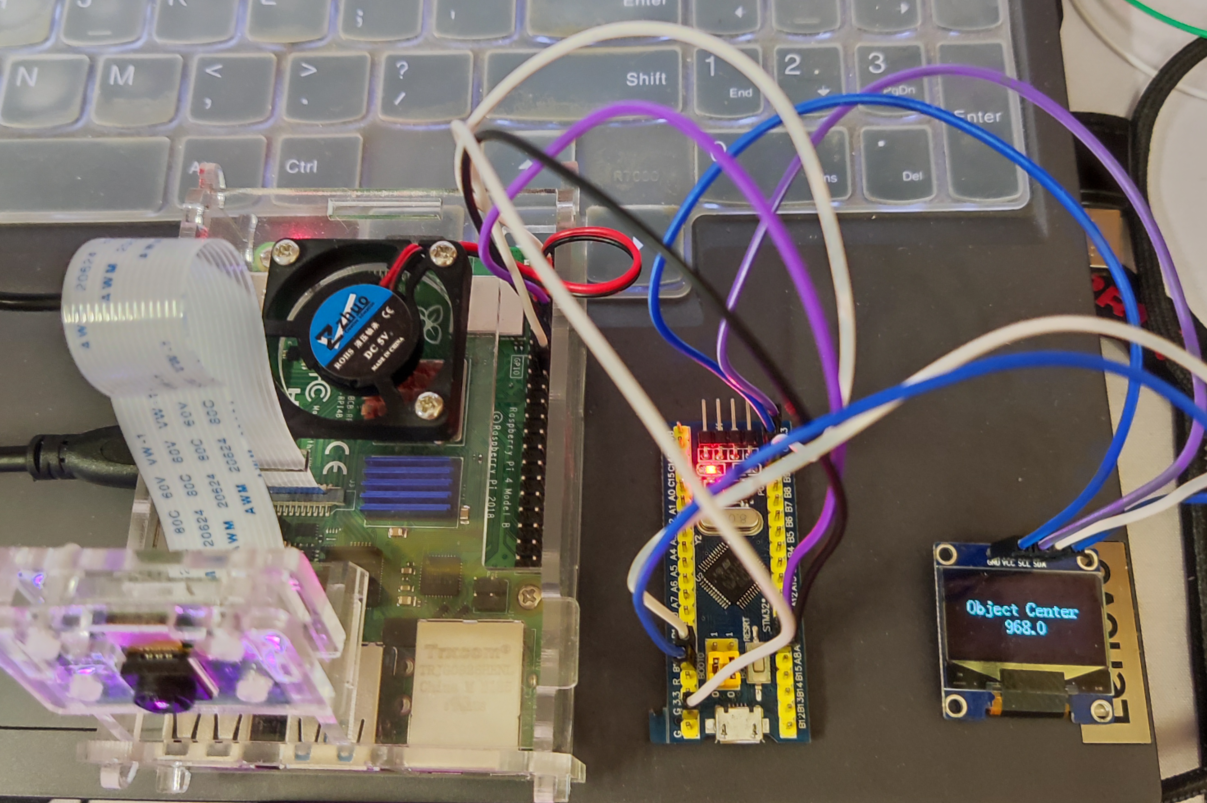
Dieses Experiment zeigt, wie eine UART (Universal Asynchronous Receiver/Transmitter)-serielle Kommunikation zwischen einem Raspberry Pi 4B und einem STM32-Mikrocontroller aufgebaut wird.
Hardware-Anforderungen
-
Raspberry Pi 4B
-
STM32-Entwicklungsboard (z.B. STM32F103C8T6, STM32F407 usw.)
-
USB-zu-TTL-Seriell-Wandler (falls benötigt)
-
Jumper-Kabel
-
Steckbrett (optional)
Verbindungsdiagramm
Raspberry Pi 4B STM32 --------------------------------- GPIO 14 (TXD) ------> USART_RX (z.B. PA3) GPIO 15 (RXD) <------ USART_TX (z.B. PA2) GND ------> GND
Hinweis: Stellen Sie sicher, dass beide Geräte eine gemeinsame Masseverbindung haben.
Raspberry Pi-Einrichtung
1. UART auf dem Raspberry Pi aktivieren
Bearbeiten Sie die Konfigurationsdatei:
sudo nano /boot/config.txt
Fügen Sie folgende Zeilen hinzu oder ändern Sie sie:
enable_uart=1 dtoverlay=disable-bt
Starten Sie den Pi neu:
sudo reboot
2. Notwendige Tools installieren
sudo apt-get install python3-serial
3. Python-Code für den Raspberry Pi
import serial import time # Seriellen Port konfigurieren ser = serial.Serial( port='/dev/serial0', # Standard-UART-Port baudrate=115200, parity=serial.PARITY_NONE, stopbits=serial.STOPBITS_ONE, bytesize=serial.EIGHTBITS, timeout=1 ) try: while True: # Daten an STM32 senden message = "Hallo STM32 vom Raspberry Pi!\n" ser.write(message.encode()) print(f"Gesendet: {message.strip()}") # Daten von STM32 empfangen if ser.in_waiting > 0: received_data = ser.readline().decode('utf-8').strip() print(f"Empfangen: {received_data}") time.sleep(1) except KeyboardInterrupt: print("Kommunikation gestoppt") ser.close()
STM32-Einrichtung (mit HAL-Bibliothek)
1. CubeMX-Konfiguration
-
USART-Peripheriegerät im asynchronen Modus aktivieren
-
Baudrate konfigurieren (muss mit dem Raspberry Pi übereinstimmen, z.B. 115200)
-
USART-Global-Interrupt aktivieren (optional für interrupt-basierten Empfang)
2. STM32-Code-Beispiel
#include "stm32f1xx_hal.h" UART_HandleTypeDef huart1; void SystemClock_Config(void); static void MX_GPIO_Init(void); static void MX_USART1_UART_Init(void); int main(void) { HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_USART1_UART_Init(); char rxBuffer[100]; char txBuffer[100]; while (1) { // Daten vom Raspberry Pi empfangen HAL_UART_Receive(&huart1, (uint8_t*)rxBuffer, sizeof(rxBuffer), HAL_MAX_DELAY); // Empfangene Daten verarbeiten (Beispiel: Echo zurücksenden) sprintf(txBuffer, "Echo: %s", rxBuffer); // Antwort an Raspberry Pi senden HAL_UART_Transmit(&huart1, (uint8_t*)txBuffer, strlen(txBuffer), HAL_MAX_DELAY); // Puffer leeren memset(rxBuffer, 0, sizeof(rxBuffer)); memset(txBuffer, 0, sizeof(txBuffer)); HAL_Delay(1000); } } // USART1-Initialisierungsfunktion static void MX_USART1_UART_Init(void) { huart1.Instance = USART1; huart1.Init.BaudRate = 115200; huart1.Init.WordLength = UART_WORDLENGTH_8B; huart1.Init.StopBits = UART_STOPBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart1.Init.OverSampling = UART_OVERSAMPLING_16; if (HAL_UART_Init(&huart1) != HAL_OK) { Error_Handler(); } } // Fehlerbehandlungsfunktion und andere notwendige Funktionen würden hier stehen
Test der Kommunikation
-
Laden Sie den Code auf Ihr STM32-Board hoch
-
Führen Sie das Python-Skript auf dem Raspberry Pi aus:
python3 uart_communication.py
-
Sie sollten Nachrichten sehen, die zwischen den Geräten ausgetauscht werden
Fehlerbehebung
-
Keine Kommunikation:
-
Überprüfen Sie die Kabelverbindungen
-
Stellen Sie sicher, dass die Baudraten auf beiden Geräten übereinstimmen
-
Stellen Sie sicher, dass eine gemeinsame Masseverbindung besteht
-
-
Verzerrte Daten:
-
Überprüfen Sie die Baudraten-Einstellungen
-
Überprüfen Sie die Spannungspegel (RPi ist 3,3V, STM32 kann 3,3V oder 5V sein - ggf. Pegelwandler verwenden)
-
-
Zugriffsverweigerungsfehler auf dem Raspberry Pi:
sudo usermod -a -G dialout pi sudo chmod a+rw /dev/serial0
Erweiterte Optionen
-
Implementieren Sie interrupt-basierten Empfang auf dem STM32 für bessere Leistung
-
Fügen Sie Protokoll-Rahmen hinzu (z.B. Start-/Endmarkierungen, Prüfsummen) für zuverlässige Kommunikation
-
Verwenden Sie DMA für Hochgeschwindigkeits-Datenübertragung
-
Implementieren Sie Flusskontrolle bei Bedarf (RTS/CTS)
Dieses grundlegende UART-Kommunikationssetup kann als Grundlage für komplexere Embedded-System-Projekte dienen, die die Fähigkeiten von Raspberry Pi und STM32 kombinieren.
Verwandte Artikel
- ·Welcher Mikrocontroller ist am besten, um Motorsprung zu steuern?
- ·Wie installiert man Windows 11 auf Raspberry Pi?
- ·Welche Sprache ist am besten für Robotik, IoT, KI, Spiele oder Web-Apps?
- ·Raspberry Pi Pico vs Arduino Nano vs STM32 Blue Pill vs ESP32 vs STM32 Black Pill | Vergleich
- ·Was sind die Fallstricke bei der Konstruktion des STM32-Uhrensystems?
- ·Synchrone und asynchrone Kommunikation von Single-Chip-Mikrocontrollern
- ·Kann das Raspberry Pi mit Batterien betrieben werden?
- ·STM32 + LoRa Drahtloses Sensornetzwerk (WSN) — Komplettes Design
- ·An welche Display-Geräte kann sich das Raspberry Pi anschließen?
- ·Smart Socket basierend auf STM32