


Wie benutzt man Beschleunigungsmesser mit Arduino?

Globaler Lieferant elektronischer Komponenten AMPHEO PTY LTD: Umfangreiches Inventar für One-Stop-Shopping. Einfache Anfragen, schnelle, individuelle Lösungen und Angebote.
Hier ist eine praktische, flufflose Anleitung zur Verwendung von Beschleunigungsmessern mit Arduino, die sowohl analoge (z. B. ADXL335) als auch digitale I²C-Sensoren (z. B. MPU-6050, ADXL345) abdeckt.
1) Sensor auswählen
-
Analog: ADXL335 (±3 g). Vorteil: einfache Verdrahtung. Nachteil: erfordert Kalibrierung & ADC-Berechnungen.
-
Digital (I²C):
Tipp: Falls später Neigung/IMU gebraucht wird → MPU-6050 nehmen (oder neuer ICM-20948).
2) Verdrahtung
Analog (ADXL335)
-
VCC → 3,3 V (manche Breakouts akzeptieren 3,3–5 V → Datenblatt prüfen)
-
GND → GND
-
X → A0, Y → A1, Z → A2
-
Optional: 0,1 µF Kondensator zwischen VCC und GND.
I²C (MPU-6050 / ADXL345)
-
VCC → 3,3 V oder 5 V (je nach Breakout mit Regler)
-
GND → GND
-
SDA → A4 (Uno/Nano), D20 (Mega)
-
SCL → A5 (Uno/Nano), D21 (Mega)
-
Viele Breakouts haben bereits Pull-Ups.
3) Arduino-Code
A) Analog (ADXL335) – Rohwerte in g
Einlesen über analogRead() auf A0/A1/A2, dann Offset & Skalierung berechnen (±1 g Kalibrierung).
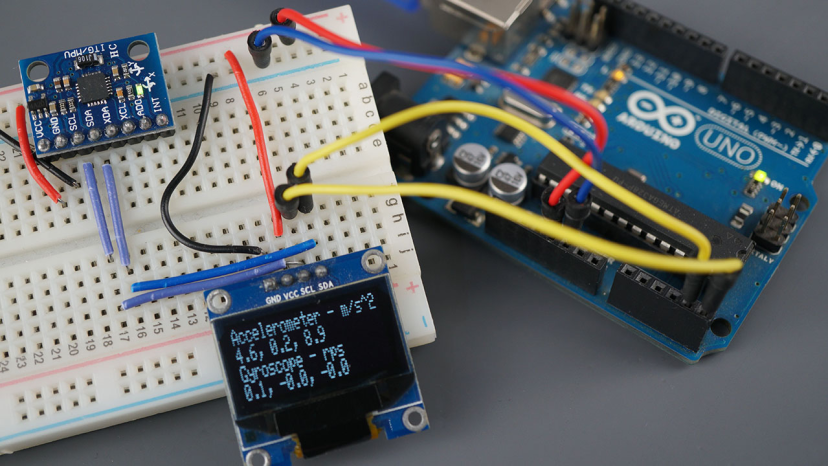
B) I²C MPU-6050 – Beispiel
C) I²C ADXL345 mit Adafruit-Bibliothek
4) Neigungswinkel (Pitch/Roll)
5) Tipps
-
Filterung: Gleitender Mittelwert (5–10 Samples) glättet Rauschen.
-
Abtastrate: 50–200 Hz für normale Bewegungen.
-
Kalibrierung: Sensor still auf Tisch legen → Null-Offsets messen. Jede Achse +1 g / −1 g messen → Skalierung berechnen.
Verwandte Artikel
- ·Erstellen Sie eine Wetterstation mit Raspberry Pi und DHT22
- ·Wie verbindet man Arduino mit anderen Mikrocontrollern oder Geräten?
- ·Wie verbindet man einen Arduino mit Bluetooth-Modulen?
- ·Welche Sprache ist am besten für Robotik, IoT, KI, Spiele oder Web-Apps?
- ·Wie nutzt man Arduino für IoT-Anwendungen?
- ·Wie erstelle ich ein physisches Mikrocontrollerprojekt mit nuller Grundlage?
- ·Warum sind 4-Bit-Mikrocontroller noch nicht abgeschafft?
- ·Was ist der Unterschied zwischen Programmiermikrocontrollern und DSPs?
- ·Was sind die beliebtesten IoT Development Boards?