


STM32 Mikrocontroller Minimum System vollständige Analyse

Globaler Lieferant elektronischer Komponenten AMPHEO PTY LTD: Umfangreiches Inventar für One-Stop-Shopping. Einfache Anfragen, schnelle, individuelle Lösungen und Angebote.
Ein Minimalsystem für einen STM32-Mikrocontroller (MCU) bezieht sich auf die einfachste Hardwarekonfiguration, die erforderlich ist, um den MCU betriebsbereit zu machen. Dies umfasst die wesentlichen Komponenten und Verbindungen, die der MCU benötigt, um sich einzuschalten, Code auszuführen und mit externen Peripheriegeräten zu interagieren. Nachfolgend finden Sie eine detaillierte Analyse des STM32-Minimalsystems:
1. STM32-Mikrocontroller
Der STM32-MCU ist das Kernstück des Systems. STM32-Mikrocontroller basieren auf ARM Cortex-M-Kernen (z. B. Cortex-M0, M3, M4, M7) und sind in verschiedenen Familien erhältlich (z. B. STM32F0, STM32F1, STM32F4, STM32H7). Das spezifische Modell bestimmt die verfügbaren Funktionen, die Leistung und die Peripheriegeräte.
2. Stromversorgung
Der STM32-MCU benötigt eine stabile Stromversorgung, um zu funktionieren. Wichtige Überlegungen:
-
Spannungsbereich:
-
Die meisten STM32-MCUs arbeiten mit 1,8 V bis 3,6 V (überprüfen Sie das Datenblatt für Ihr spezifisches Modell).
-
Eine 3,3-V-Versorgung wird häufig verwendet.
-
-
Entkopplungskondensatoren:
-
Platzieren Sie 100-nF-Keramikkondensatoren in der Nähe jedes Versorgungspins (VDD/VSS), um Rauschen zu filtern.
-
Fügen Sie einen 4,7-µF- bis 10-µF-Elko in der Nähe des MCU hinzu, um zusätzliche Stabilität zu gewährleisten.
-
-
Stromversorgungspins:
-
Verbinden Sie alle VDD-Pins mit der Stromversorgung.
-
Verbinden Sie alle VSS-Pins mit der Masse.
-
3. Taktquelle
Der STM32 benötigt eine Taktquelle für seinen Betrieb. Es gibt zwei Optionen:
-
Interner Takt:
-
STM32-MCUs verfügen über interne RC-Oszillatoren (z. B. 8 MHz für HSI, 32 kHz für LSI).
-
Geeignet für grundlegende Anwendungen, aber weniger genau.
-
-
Externer Takt:
-
Verwenden Sie einen externen Quarzoszillator für höhere Genauigkeit.
-
Hochgeschwindigkeitsquarz (HSE): Typischerweise 4–26 MHz.
-
Niedriggeschwindigkeitsquarz (LSE): Typischerweise 32,768 kHz für den Echtzeituhr (RTC).
-
-
Fügen Sie Lastkondensatoren (z. B. 10–22 pF) zum Quarzoszillator-Schaltkreis hinzu.
-
4. Reset-Schaltung
Eine Reset-Schaltung stellt sicher, dass der MCU korrekt startet:
-
Reset-Pin (NRST):
-
Verbinden Sie einen 10-kΩ-Pull-up-Widerstand mit VDD.
-
Fügen Sie einen 100-nF-Kondensator zur Masse hinzu, um Prellen zu vermeiden.
-
Optional können Sie einen Taster für einen manuellen Reset hinzufügen.
-
5. Boot-Konfiguration
Der STM32 verfügt über Boot-Modi, um festzulegen, wie er startet:
-
Boot-Pins (BOOT0 und BOOT1):
-
Setzen Sie BOOT0 und BOOT1, um den Boot-Modus zu konfigurieren:
-
BOOT0=0, BOOT1=X: Booten vom Flash-Speicher (Standard).
-
BOOT0=1, BOOT1=0: Booten vom System-Speicher (für Firmware-Updates).
-
BOOT0=1, BOOT1=1: Booten vom eingebetteten SRAM.
-
-
Verwenden Sie Pull-up/Pull-down-Widerstände, um den gewünschten Boot-Modus festzulegen.
-
6. Debugging-Schnittstelle
Für die Programmierung und das Debugging:
-
SWD (Serial Wire Debug):
-
Verwenden Sie die SWDIO- und SWCLK-Pins für die Programmierung und das Debugging.
-
Verbinden Sie einen 10-kΩ-Pull-up-Widerstand mit SWDIO.
-
-
JTAG:
-
Optionale Alternative zu SWD, erfordert jedoch mehr Pins.
-
7. GPIO-Konfiguration
-
Unbenutzte Pins:
-
Lassen Sie unbenutzte GPIO-Pins unverbunden oder konfigurieren Sie sie als Eingänge mit Pull-up/Pull-down-Widerständen, um schwebende Zustände zu vermeiden.
-
-
LEDs und Taster:
-
Fügen Sie LEDs und Taster für grundlegendes Debugging und Benutzerinteraktion hinzu.
-
8. Optionale Komponenten
-
Spannungsregler:
-
Wenn die Eingangsspannung höher als 3,3 V ist, verwenden Sie einen 3,3-V-Regler (z. B. LDO).
-
-
Externe Peripheriegeräte:
-
Fügen Sie Sensoren, Displays oder Kommunikationsmodule (z. B. UART, SPI, I2C) nach Bedarf hinzu.
-
Schaltplan des STM32-Minimalsystems
Hier ist eine vereinfachte Darstellung des Schaltplans:
-
Stromversorgung:
VDD ----||--- GND (100-nF-Entkopplungskondensatoren) VDD ----||--- GND (4,7-µF-Elko)
-
Reset-Schaltung:
NRST ---- 10 kΩ ---- VDD NRST ---- 100 nF ---- GND NRST ---- Taster ---- GND
-
Takt-Schaltung:
OSC_IN ---- Quarz ---- OSC_OUT OSC_IN ---- 10–22 pF ---- GND OSC_OUT ---- 10–22 pF ---- GND
-
Boot-Konfiguration:
BOOT0 ---- 10 kΩ ---- GND (für Flash-Boot-Modus) BOOT1 ---- 10 kΩ ---- GND
-
Debugging-Schnittstelle:
SWDIO ---- 10 kΩ ---- VDD SWDIO ---- Debugger SWCLK ---- Debugger
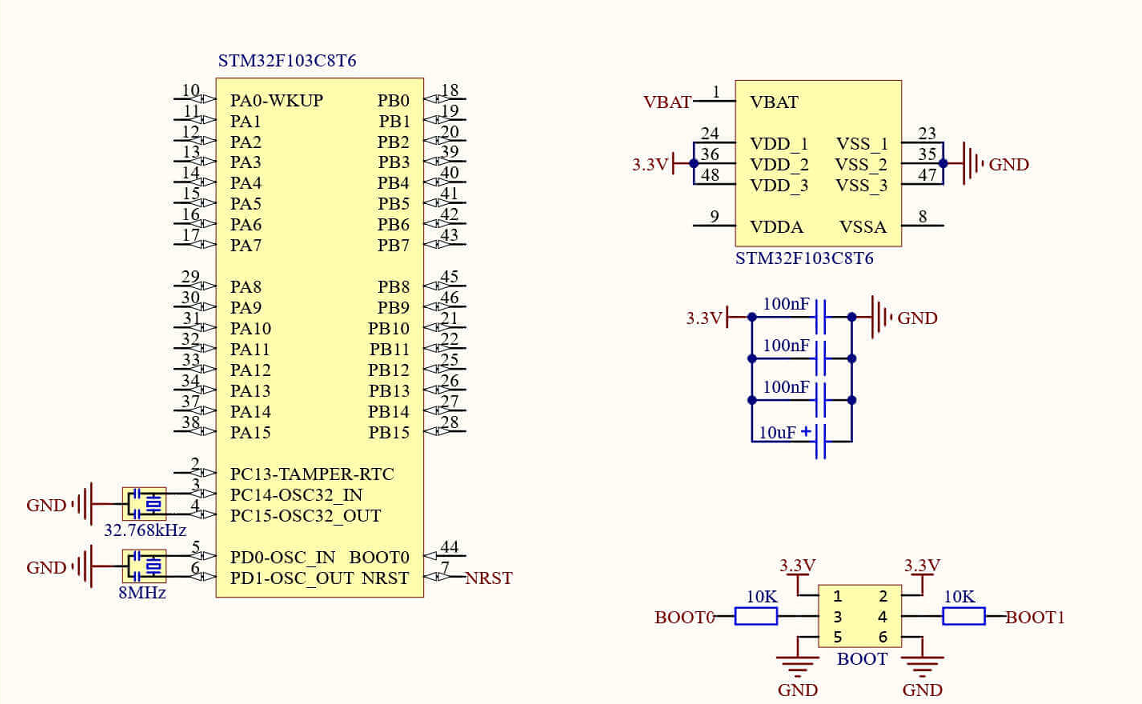
Beispiel: STM32F103C8T6-Minimalsystem
-
MCU: STM32F103C8T6 (Cortex-M3, 64 KB Flash, 20 KB RAM).
-
Stromversorgung: 3,3 V.
-
Takt: 8-MHz-Quarz (HSE).
-
Reset: 10-kΩ-Pull-up-Widerstand, 100-nF-Kondensator und Taster.
-
Boot-Modus: BOOT0=0, BOOT1=0 (Flash-Speicher).
-
Debugging: SWD-Schnittstelle.
Fazit
Ein Minimalsystem für einen STM32-Mikrocontroller umfasst:
-
Stromversorgung mit Entkopplungskondensatoren.
-
Taktquelle (intern oder extern).
-
Reset-Schaltung.
-
Boot-Konfiguration.
-
Debugging-Schnittstelle (SWD oder JTAG).
Dieses Setup stellt sicher, dass der STM32-MCU sich einschalten, Code ausführen und programmiert/debuggt werden kann. Zusätzliche Peripheriegeräte können je nach Anwendungsanforderungen hinzugefügt werden.
Verwandte Artikel
- ·Welcher Mikrocontroller ist am besten, um Motorsprung zu steuern?
- ·Welche Sprache ist am besten für Robotik, IoT, KI, Spiele oder Web-Apps?
- ·Raspberry Pi Pico vs Arduino Nano vs STM32 Blue Pill vs ESP32 vs STM32 Black Pill | Vergleich
- ·Was sind die Fallstricke bei der Konstruktion des STM32-Uhrensystems?
- ·STM32 + LoRa Drahtloses Sensornetzwerk (WSN) — Komplettes Design
- ·Wie erstelle ich ein physisches Mikrocontrollerprojekt mit nuller Grundlage?
- ·Warum sind 4-Bit-Mikrocontroller noch nicht abgeschafft?
- ·Zerlegen Sie einen Motorola Pager und sehen Sie, wie er im Inneren aufgebaut ist!
- ·Smart Socket basierend auf STM32
- ·Was ist der Unterschied zwischen Programmiermikrocontrollern und DSPs?